PWM
PWM1 ~ PWM13 Dshot ve PWM yeteneğine sahiptir. Bununla birlikte, çıkışlar için Dshot ve normal PWM işleminin karıştırılması gruplara sınırlıdır, yani. Bir grupta bir çıktı için Dshot etkinleştirilmesi, bu gruptaki tüm çıktıların PWM çıkışlarından ziyade Dshot olarak yapılandırılmasını ve kullanılmasını gerektirir.
Servo ve motor aynı grupta karıştırılırsa, bu grubun servo spesifikasyonuna göre en düşük PWM frekansını çalıştırdığından emin olun. Yani. Servo Max destekler. 50Hz, ESC bu grupta 50hz'de çalışmalıdır.
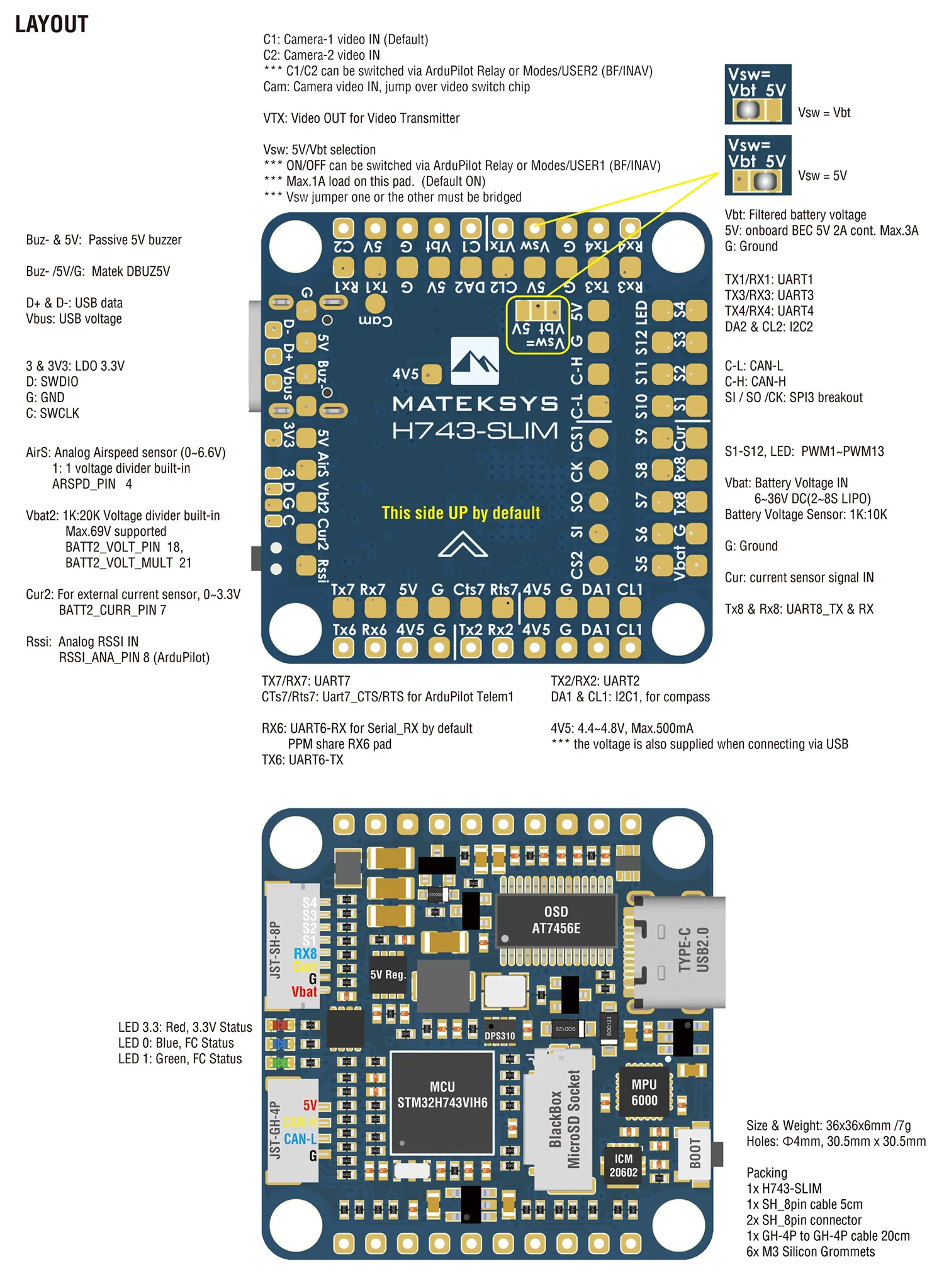
S1
PB0
5 V toleranslı I/O
PWM1 GPIO50
TIM8_CH2N
Group1
S2
PB1
3.3 V toleranslı I/O
PWM2 GPIO51
TIM8_CH3N
S3
PA0
5 V toleranslı I/O
PWM3 GPIO52
TIM5_CH1
Group2
S4
PA1
5 V toleranslı I/O
PWM4 GPIO53
TIM5_CH2
S5
PA2
5 V toleranslı I/O
PWM5 GPIO54
TIM5_CH3
S6
PA3
5 V toleranslı I/O
PWM6 GPIO55
TIM5_CH4
S7
PD12
5 V toleranslı I/O
PWM7 GPIO56
TIM4_CH1
Gourp3
S8
PD13
5 V toleranslı I/O
PWM8 GPIO57
TIM4_CH2
S9
PD14
5 V toleranslı I/O
PWM9 GPIO58
TIM4_CH3
S10
PD15
5 V toleranslı I/O
PWM10 GPIO59
TIM4_CH4
S11
PE5
5 V toleranslı I/O
PWM11 GPIO60
TIM15_CH1
Group4
S12
PE6
5 V toleranslı I/O
PWM12 GPIO61
TIM15_CH2
LED
PA8
5 V toleranslı I/O
PWM13 GPIO62
TIM1_CH1
Group5
SERVO13_FUNCTION 120, NTF_LED_TYPES neopixel
ADC ADC
Ped yok
1K:10K bölücü yerleşik
PC0
0 ~ 36V
Gemide akü voltajı
BATT_VOLT_PIN
BATT_VOLT_MULT
10
11.0
Ped yok
PC1
0 ~ 3.3V
Gemide akım sensörü
BATT_CURR_PIN
BATT_AMP_PERVLT
11
40
Vbat2 ped
1K:20K bölücü yerleşik
PA4
0 ~ 69V
Vbat2 ADC
BATT2_VOLT_PIN
BATT2_VOLT_MULT
18
21.0
Cur2 ped
PA7
0 ~ 3.3V
Cur2 ADC
BATT2_CURR_PIN
BATT2_AMP_PERVLT
7
/
RSSI ped
PC5
0 ~ 3.3V
RSSI ADC
Analog RSSI
RSSI_ANA_PIN
RSSI_TYPE
8
1
Hava yastığı
10K:10K bölücü yerleşik
PC4
0 ~ 6.6V
AirS ADC
Analog hız ölçer
ARSPD_PIN
ARSPD_TYPE
4
2
I2C
I2C1
CL1/DA1
PB6/PB7
5 V toleranslı I/O
Dijital hız I2C
ARSPD_BUS
1
MS4525
MS5525
DLVR-L10D
ARSPD_TYPE
1
3
9
Pusula
COMPASS_AUTODEC
1
I2C2
CL2/DA2
PB10/PB11
5 V toleranslı I/O
Gemide Baro DPS310
CAN
CAN1
PD0/PD1
5 V toleranslı I/O
F103/F303 düğüm olabilir
CAN_D1_PROTOCOL
Can_p1_sürücü
1
1
GPS olabilir
GPS_TYPE
9
Pusula olabilir
COMPASS_TYPEMASK
0
Hız sensörü olabilir
ARSPD_TYPE
8
UART
USB
PA11/PA12
5 V toleranslı I/O
USB
Konsol
SERIAL0
RX7 TX7 RTS7 CTS7
PE7/8/9/10
3.3 V toleranslı I/O
UART7
Telem1
SERIAL1
TX1 RX1
PA9/PA10
5 V toleranslı I/O
USART1
Telem2
SERIAL2
TX2 RX2
PD5/PD6
5 V toleranslı I/O
USART2
GPS1
SERIAL3
TX3 RX3
PD8/PD9
5 V toleranslı I/O
USART3
GPS2
SERIAL4
TX8 RX8
PE1/PE0
5 V toleranslı I/O
UART8
Kullanıcı
SERIAL5
TX4 RX4
PB9/PB8
5 V toleranslı I/O
UART4
Kullanıcı
SERIAL6
TX6 RX6
PC6/PC7
5 V toleranslı I/O
USART6
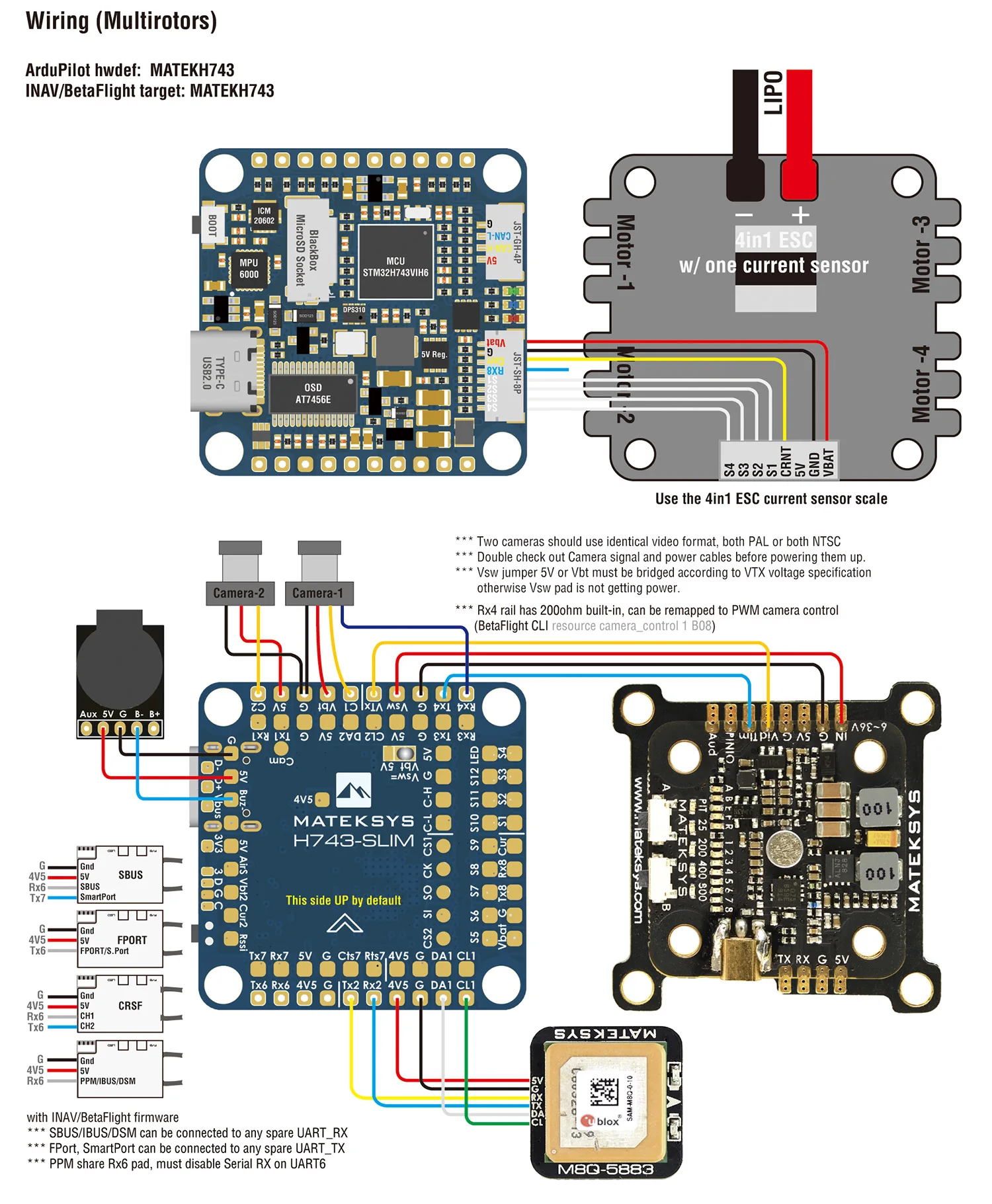
RC giriş/alıcı
SERIAL7
RX6
SBUS/IBUS/DSM
RX6
PPM











