








Mateksys Dijital UAVCAN Airspeed Sensör ASPD-DLVR
6.000,00 TL + KDV
Stok Kodu
T89
Fiyat
6.000,00 TL + KDV
KDV Dahil Fiyat
7.200,00 TL




-
All sensors DLVR series is the best airspeed sensor ArduPilot currently support.
- ArduPilot AP_Periph L431/F405/F303 CAN node
- All sensors DLVR-L10D, Industrial temperature range
- CAN & I2C Interface
- Typical Platforms: Fixed-Wing, QuadPlane, VTOL
- CAN JST-GH connector, UAVCAN/DroneCAN Protocol
- I2C JST-GH connector, DLVR-L10D I2C mode (I2C address 0x28)
- F303 ver. (Black PCB)
- UART1, Firmware update
- UART2, Spare for external GPS
- F405 ver. (Blue PCB)
- UART1, Firmware update
- UART4, Spare for external GPS
- L431 ver. (Purple PCB)
- UART2, Firmware update
- UART3, Spare for external GPS
- CAN bootloader LED, Blue
- Fast blinking, AP_Periph bootloader
- Slow blinking, CAN Node ready
- 3.3V Power LED, Red
- Input voltage range: 4.5~5.5V
- Power consumption: 60mA
- Operating Temperatures: -20°C to 85°C
- Pressure Range: 2500Pa (± 10 inH2O)
- Burst Pressure: 75kPa
- Speed Range: ±250 km/h
- 22mm*22mm*12.5mm(F303 ver.)
- 23mm*23mm*12.5mm(F405 ver.)
- 4g
- 1x ASPD-DLVR
- 2x JST-GH-4P to JST-GH-4P 20cm silicon wire
- Pitot Tube
- Clear silicon tubing 40cm
-
Firmware: https://firmware.ardupilot.org/AP_Periph/stable/
- F303 CAN node, Black PCB, ArduPilot hwdef "f303-MatekGPS”
- F405 CAN node, Blue PCB, ArduPilot hwdef "f405-MatekAirspeed” or "f405-MatekGPS”
- L431 CAN node, Purple PCB, ArduPilot hwdef "MatekL431-Airspeed” or "MatekL431-Periph”
Specifications & Features
Includes
——————————————————————————-
Wiring and AP Parameters
CANorI2CASPD-DLVRFlight ControllerASPD-DLVRFlight Controller5V5V5V5VC-HCAN HighSCLSCLC-LCAN LowSDASDAGGNDGGNDCAN_D1_PROTOCOL1CAN_P1_DRIVER1ARSPD_PIN65ARSPD_TYPE8 (UAVCAN)ARSPD_TYPE9 (I2C-DLVR-10in)ARSPD_USE1ARSPD_USE1Mission Planner->
Initial Setup->
Optional Hardware->
UAVCAN->
SLCan Mode CAN1 ->
Parameters -> ARSP_TYPE9 (DLVR-10in)
Write and reboot
Pinout & Pads
GH-4P PinSignalWires colorGH-4P PinSignalWires color5V4~6V inputRed5V4.5~5.5V inputRedC-HCAN highYellowSCLI2C-SCLYellowC-LCAN lowBlueSDAI2C-SDABlueGGNDBlackGGNDBlackT1UART1-TXTx1UART1-TXbtBoot pinR1UART1-RXRx1UART1-RX3 / 3v3onboard LDO outputTx2UART2-TXTx4UART4-TXDSWDIORx2UART2-RXRx4UART4-RXGGNDTx3UART3-TXTx5UART5-TXCSWCLKRx3UART3-RXRx5UART5-RXRSTNRST
–
–
1. Update firmware in Mission Planner with "AP_Periph.bin”
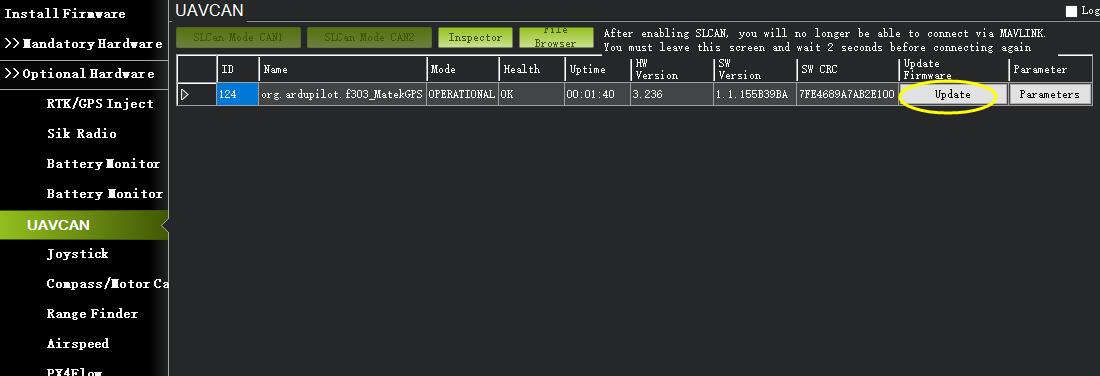
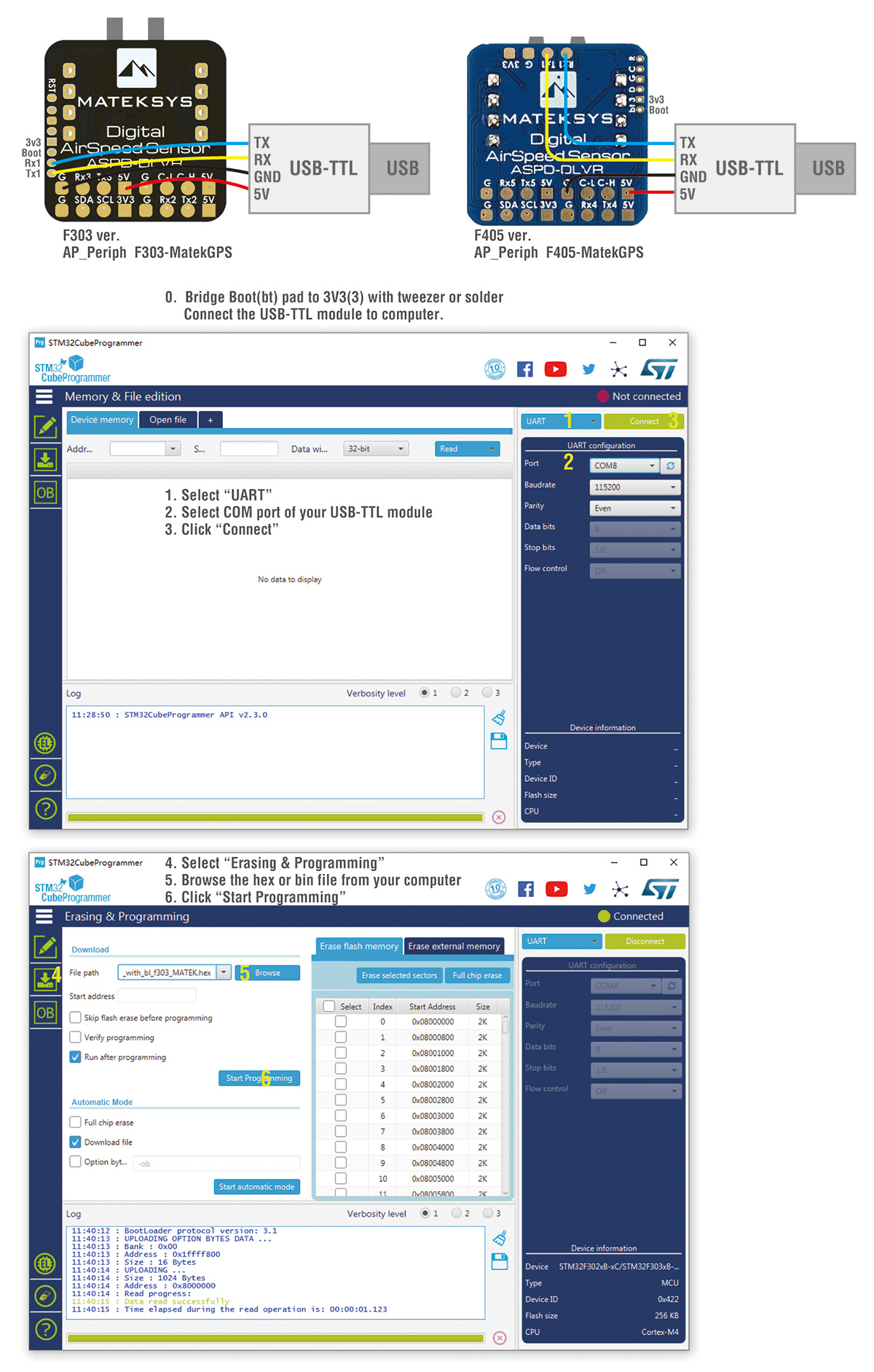
2. Update firmware in STM32CubeProgrammer with "AP_Periph_with_bl.hex”
Tool https://www.st.com/en/development-tools/stm32cubeprog.html
You may download Windows version from our server en.stm32cubeprog_v2-3-0.zip
Bu ürüne ilk yorumu siz yapın!
Includes
——————————————————————————-
Wiring and AP Parameters
CANorI2CASPD-DLVRFlight ControllerASPD-DLVRFlight Controller5V5V5V5VC-HCAN HighSCLSCLC-LCAN LowSDASDAGGNDGGNDCAN_D1_PROTOCOL1CAN_P1_DRIVER1ARSPD_PIN65ARSPD_TYPE8 (UAVCAN)ARSPD_TYPE9 (I2C-DLVR-10in)ARSPD_USE1ARSPD_USE1Mission Planner->
Initial Setup->
Optional Hardware->
UAVCAN->
SLCan Mode CAN1 ->
Parameters -> ARSP_TYPE9 (DLVR-10in)
Write and reboot
Pinout & Pads
GH-4P PinSignalWires colorGH-4P PinSignalWires color5V4~6V inputRed5V4.5~5.5V inputRedC-HCAN highYellowSCLI2C-SCLYellowC-LCAN lowBlueSDAI2C-SDABlueGGNDBlackGGNDBlackT1UART1-TXTx1UART1-TXbtBoot pinR1UART1-RXRx1UART1-RX3 / 3v3onboard LDO outputTx2UART2-TXTx4UART4-TXDSWDIORx2UART2-RXRx4UART4-RXGGNDTx3UART3-TXTx5UART5-TXCSWCLKRx3UART3-RXRx5UART5-RXRSTNRST
–
–
1. Update firmware in Mission Planner with "AP_Periph.bin”
2. Update firmware in STM32CubeProgrammer with "AP_Periph_with_bl.hex”
Tool https://www.st.com/en/development-tools/stm32cubeprog.html
You may download Windows version from our server en.stm32cubeprog_v2-3-0.zip
Bu ürüne ilk yorumu siz yapın!
——————————————————————————-